|
Материалы научно-исследовательских проектов
Новые типы движителей для плавсредств
2. Электромеханический привод
Известные варианты. Для экспериментальных исследований необходимо собрать или изготовить электромеханический привод, с помощью которого
можно передавать энергию двигателя движителю. Из общеизвестных вариантов приводов мы выбрали для своих моделей зубчатую и ременную передачи.
Кривошипно-шатунный
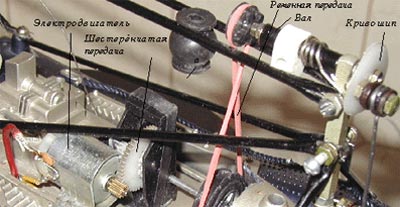
механизм Общий вид электромеханического привода дан на фото. В качестве двигателя мы использовали электродвигатель (угловая
скорость 75 об/с) от радиоуправляемой игрушки на четырёх батареях постоянного (4×1,5 В) напряжения типа АА. Два редуктора понижали
угловую скорость двигателя до 5–7 об/с: один, шестерёнчатый, от той же игрушки, другой, ременной, изготовлен нами. В качестве ремня
использовалось резиновое кольцо. На один конец вала был насажен шкив, на другой – кривошип.
Электромеханический привод
Общий вид модели
плавсредства – надводного судна Общий вид модели плавсредства, несущей всю двигательно-движительную систему, показан на фото. Система допускает быструю замену движителя,
закрепляемого на штоке и совершающего в процессе работы возвратно-поступательное движение. Шток – силовой элемент, оказывающий знакопеременное
силовое воздействие на движитель.
3. Наши исследования
Гипотеза. При выполнении проектов [1, 2] мы выявили правило U = δ/L= 0,29, выполняющееся для всех маховых перьев птиц (исследовались перья городского голубя, вороны, орла и чайки). Более того, оказалось,
что выбор точки захвата подводного кайта в соответствии с правилом U = 0,29 приводит буквально к вылету модели из-под воды. В результате
родилась гипотеза: если взять гибкую упругую пластину и придать ей знакопеременное перемещение в направлении, перпендикулярном плоскости
пластины, то следует ожидать появления силы тяги в направлении, перпендикулярном направлению этого перемещения. Такая колеблющаяся пластина может
использоваться как судовой движитель.
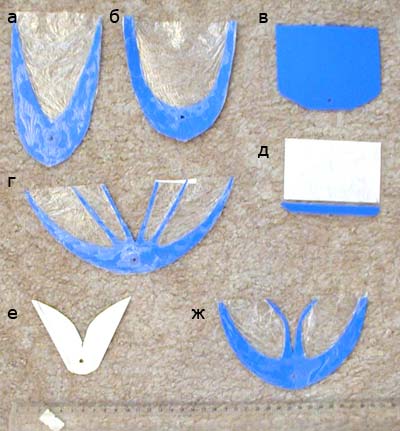
Движители. На фото представлены движители различной формы, которые испытывались нами в лабораторных условиях, будучи установленными на
модели описанного выше радиоуправляемого надводного судна. Сначали испытывались движители прямоугольной формы, выполненные из полимерной плёнки
толщиной 0,4 мм (в) и 0,15 мм (д). Положение точки захвата движителя (круглое отверстие – белая точка на фото) определялось в
соответствии с правилом U = 0,29. Выяснилось, что прямоугольная пластина деформируется сложным образом (рис.А): при движении точки
захвата вверх передние углы пластины, помеченные двумя верхними звёздочками, отгибаются вниз, также как и задняя часть пластины, причём наиболее
сильно отклоняется её средняя точка (правая звёздочка).
Рис.А. Форма прямоугольного движителя в свободном состоянии (вверху) и под действием внешней
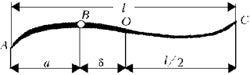
силы F (внизу). Звёздочками помечены области максимального смещения Рис. Б. К определению
внутреннего контура движителя Затем строили внутренний контур (рис.Б): из каждой точки, например C, внешнего контура восстанавливали перпендикуляр до пересечения с линией заднего обреза (точка D
) и делили отрезок CD на две части в соответствии с правилом U = 0,29. После этого по возможности ближе к внутреннему контуру
просверливали точку захвата. На образованный таким образом «ствол» наклеивали тонкую (0,015 мм) полимерную плёнку (варианты а, б
, г, ж на фото). Так получились движители типа а, б на фото. Движители типа г, ж использовались для
выяснения влияния разрезов и силовых элементов («рёбер жёсткости»). Движитель е – простейшая имитация рыбьего хвоста.
|